[Games101笔记]Lecture1 2
该笔记基于闫令琪大神的cs课程及课后作业总结而成
学习过程中遇到的一些词
-
Geometrically: Parallelogram law & Triangle law 几何:平行四边形定律和三角形定律
-
Algebraically: Simply add coordinates 代数上:简单地添加坐标
- usually orthogonal unit 通常正交单元
-
Cartesian Coordinates 笛卡尔坐标
-
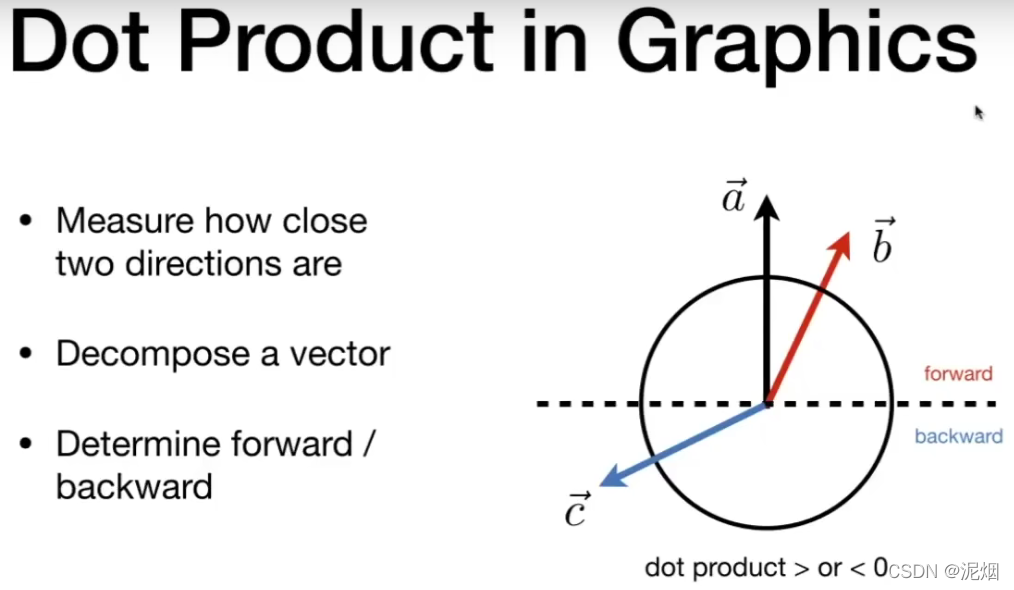
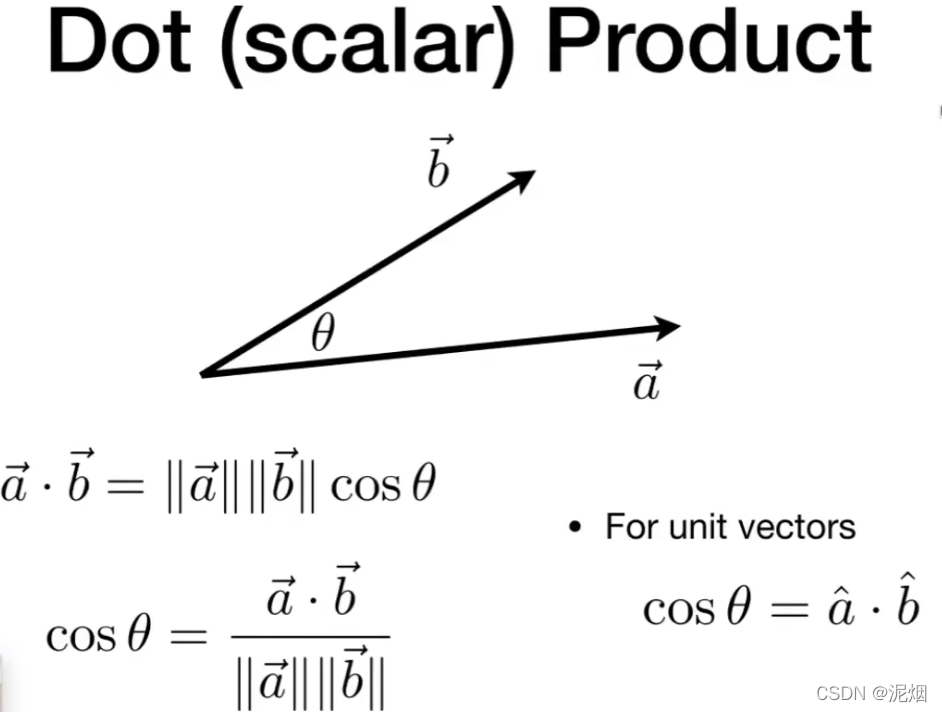
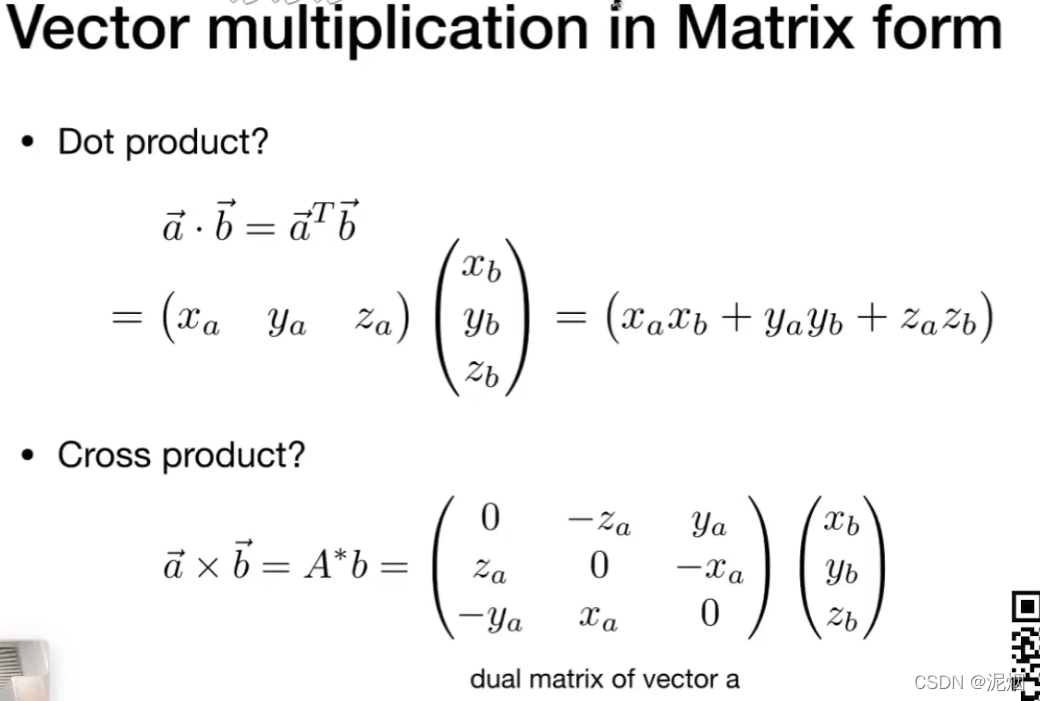
Dot product 点积
-
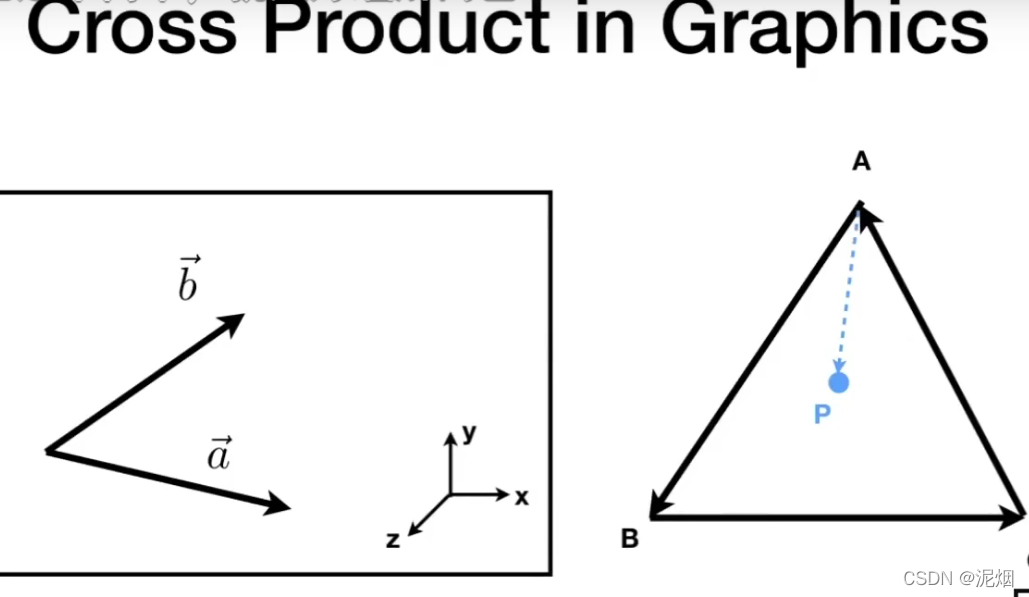
Cross product 交叉积
-
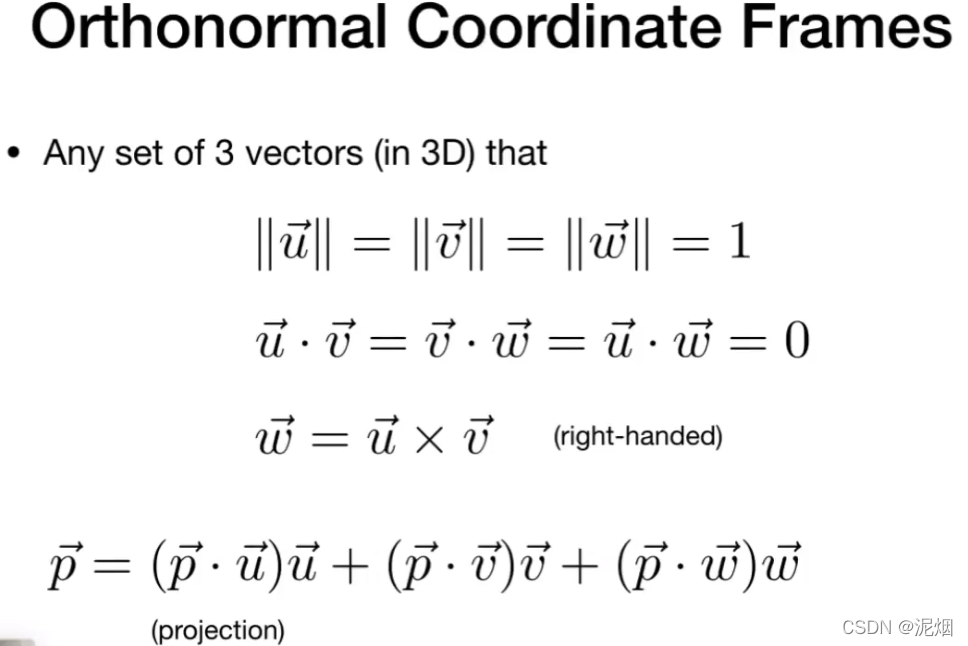
Orthonormal bases and coordinate frames 正交基与坐标框架
-
Decompose a vector 分解向量
-
dual matrix of vector a 向量a的对偶矩阵
-
homogenous coordinate 齐次坐标
线代基础
点乘可分解向量以及判断向量之间接近or远离
叉乘可判断方位
点乘
叉乘求得的结果垂直于两个原始向量,因此常用于求法线, 所以三维软件会提供翻转法线的功能 opengl永远是右手系,DirectX经常是左手系
a在b的左侧的意思是,a经过不大于180°的逆时针旋转可以与b的方向一致,右侧同理,方向变为顺时针
点在所有向量左侧或在所有向量左侧,就是多边形内部
Eigen库的用处
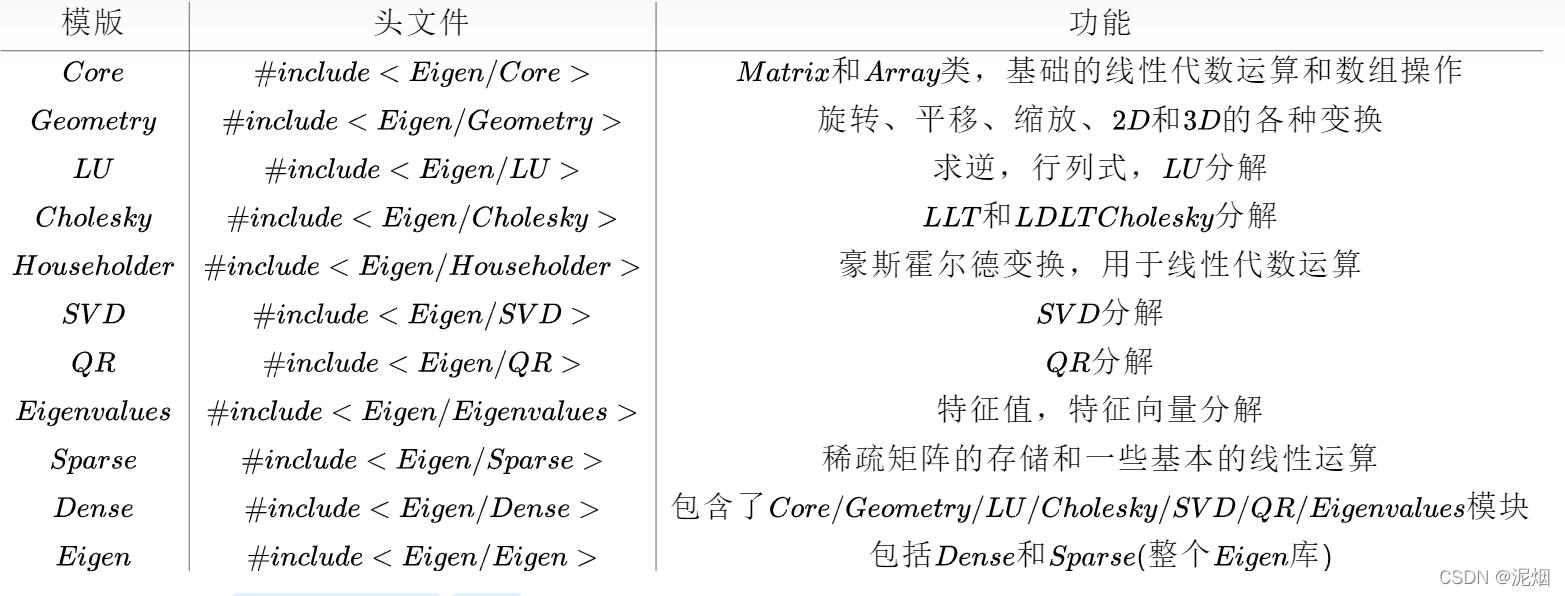
Eigen: Matrix and vector arithmetic
矩阵/向量的练习:
注:C++中 三角函数运算使用弧度制
#include <iostream>
#include <Eigen/Dense>
using namespace Eigen;
int main()
{
std::cout << "Example of cpp :\n";
float a = 1.0, b = 2.0;
std::cout << a << std::endl;
std::cout << a / b << std::endl;
std::cout << std::sqrt(b) << std::endl;//√2
std::cout << std::acos(-1) << std::endl;//arccos(-1)
std::cout << std::sin(30.0 / 180.0 * acos(-1)) << std::endl;//sin(30°)
Matrix2d a;
a << 8, 2,
2, 1;
MatrixXd b(2, 2);
b << 4, 1,
1, 4;
std::cout << "a =\n" << a << std::endl;
std::cout << "b =\n" << b << std::endl;
std::cout << "a + b =\n" << a + b << std::endl;
std::cout << "a - b =\n" << a - b << std::endl;
std::cout << "Do: a += b;" << std::endl;
a += b;
std::cout << "Now: a =\n" << a << std::endl;
MatrixXf i(3,3), j(3,3);
i << 1.0, 2.0, 3.0, 4.0, 5.0, 6.0, 7.0, 8.0, 9.0;
j << 2.0, 3.0, 1.0, 4.0, 6.0, 5.0, 9.0, 7.0, 8.0;
std::cout << "i * j =\n" << i*j << std::endl;
Vector3d v(1, 2, 3);
Vector3d w(1, 2, 4);
std::cout << "v =\n" << v << std::endl;
std::cout << "w =\n" << w << std::endl;
std::cout << "v - 2 * w =\n" << v - 2 * w << std::endl;
MatrixXf c(2, 3);
c << 1, 2, 3, 4, 5, 6;
std::cout << "Here is the initial matrix c:\n" << c << std::endl;
c.transposeInPlace();
std::cout << "and after being transposed:\n" << c << std::endl;
}
- 测试效果:
Example of cpp : 1 0.5 1.41421 3.14159 0.5 a = 8 2 2 1 b = 4 1 1 4 a + b = 12 3 3 5 a - b = 4 1 1 -3 Do: a += b; Now: a = 12 3 3 5 i * j = 37 36 35 82 84 77 127 132 119 v = 1 2 3 w = 1 2 4 v - 2 * w = -1 -2 -5 Here is the initial matrix c: 1 2 3 4 5 6 and after being transposed: 1 4 2 5 3 6